Ремонт мойщика окон Hobot 188, замена двигателя колеса

Сломался робот-мойщик окон Hobot 188.
Вещь крайне удобная, вот тут обзор уважаемого мной DiHalt-а, на Hobot 168, но от 188-го по принципу действия они не отличаются: dihalt.ru/robota-dlya-mojki-okon-hobot-168-obzor.html
В чем выражалась поломка: к окну присасывается, но на любую команду пульта — писк, моргание красным светодиодом и всё, работать не хочет.
Привыкли к нему, хочется и дальше пользоваться плодами прогресса.
Поиски в иннете по причинам поломки и методам исправлений успехом не увенчались, поэтому решил написать обзор, может кому пригодится.
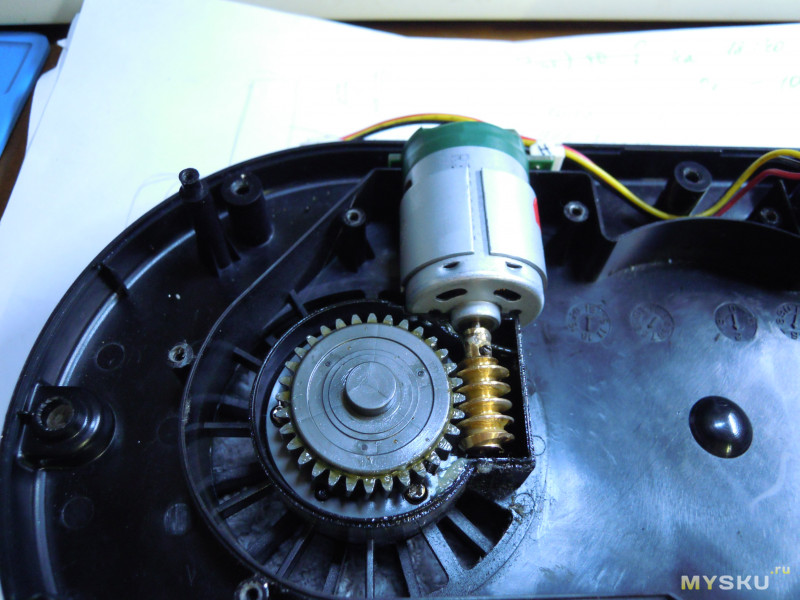
Вкратце: виноват оказался нижний двигатель. В данном случае, ремонт заключается в его замене.
Можно было сдать в ремонт, но это не наш метод. Во-первых, долго, во-вторых, лишних денег нет, а время и желание отремонтировать есть.
Поискал в инете, путного не нашел. Решил, что сгорел драйвер двигателя. Разобрал. Мозги робота — одна плата, спаяна качественно, аккуратно, все соединения на разъемах. Красота.
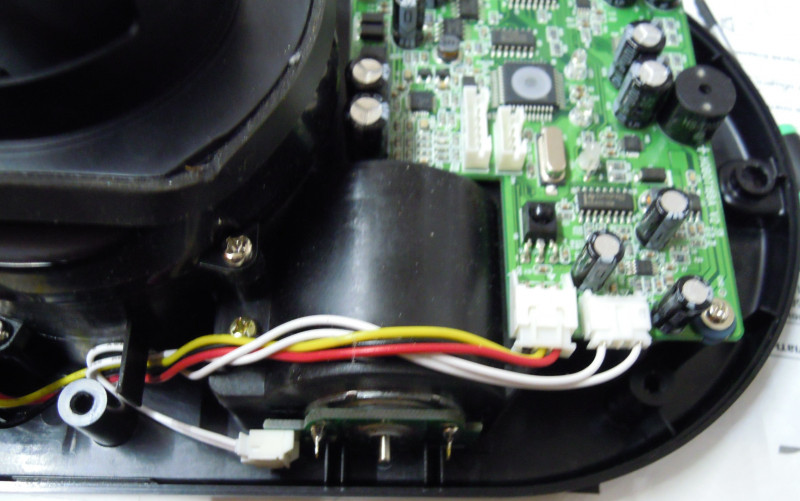
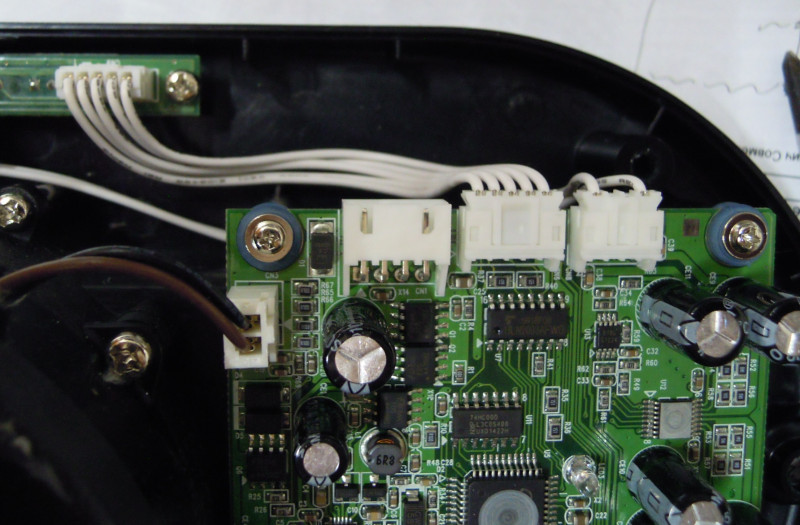
Оба двигателя колес управляются одним МК, маркировка которого затерта.
Заменил двигатели моющих колес местами — ситуация немного изменилась: робот при старте проверяет работоспособность вначале нижнего двигателя, потом верхнего. Покрутил нижним, на верхнем — стопор.
Уже хорошо, т.к. плата управления стоит дороже намного, чем двигатель. В онлайн находил плату за 6600 руб, комплект двигателя с «червяком» и платкой с разъёмом — от 1380 руб. Но либо «нет в наличии», либо по указанным контактам не отвечают, ни на почту, ни по телефону. Нашел за 2500 руб. Плюс пересылка. Дорого.
Решил посмотреть детально, что с движком.
Сравнил исправный двигатель верхнего колеса (ИВД) и неисправный нижнего (ННД). Ток потребления холостого хода (ХХ) ИВД — 70 мА (от напряжения слабо зависит, пусть 6 В), при умеренной нагрузке повышается до 0,15 А, у ННД — ток ХХ = 100 мА, при нагрузке — 0,4 А.
Вот эта хня и не нравится контроллеру.
Осциллограмма ИВД — почти ровная синусоида,
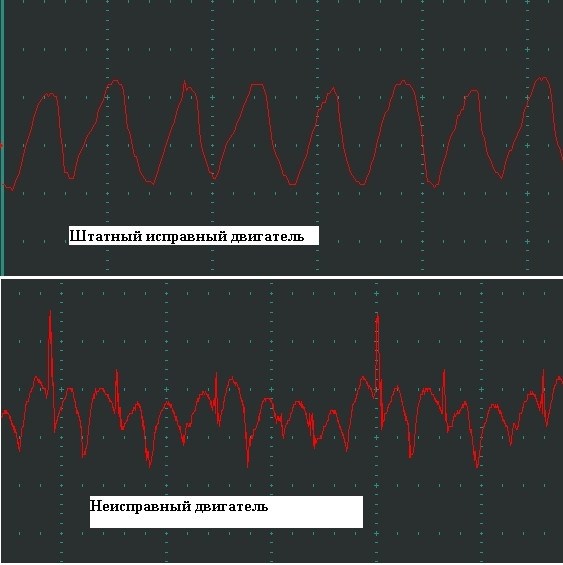
на осциллограмме ННД просматриваются шпили. Похоже, на одной из обмоток — межвитковая коза.
Думаю, а почему-бы двигатель не перемотать, разобрал двигатель и стало как-то грустно. Наматывать такое чистый мазохизм. Пойдем другим путем.

Есть у нас оффлайн магазин радиотоваров, продаются в нем, в том числе и электродвигатели.
Но как подобрать нужный?
Маркировка штатного двигателя иннету не известна.
Каковы его характеристики выяснить не удалось.
Ладно, измерим сами.
Вот результаты:
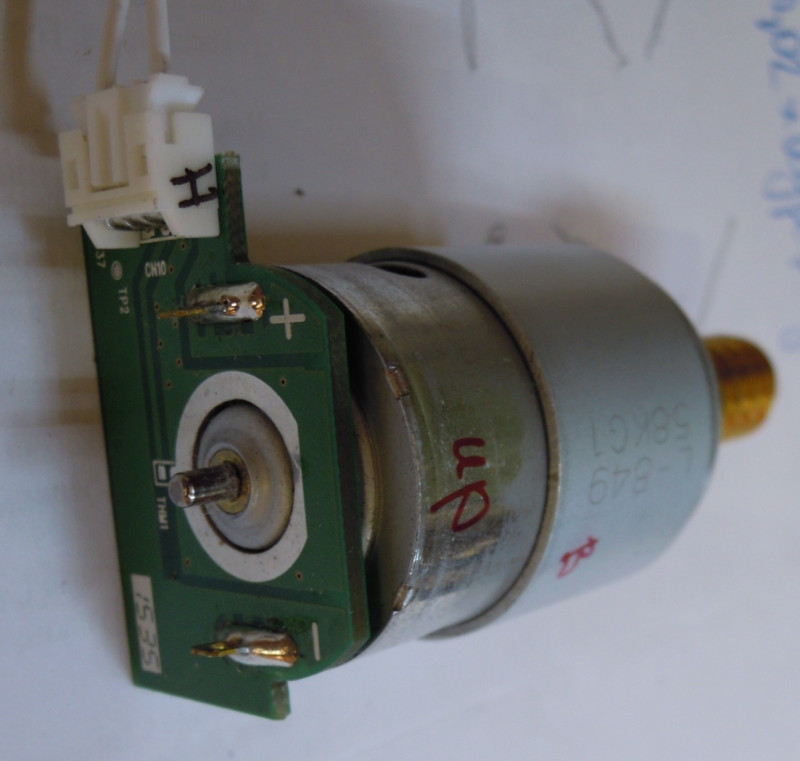
Параметры оригинального двигателя:
надпись: L-849 58KG1
напряжение питания: 12 В (питается робот от 12В, значит назначим 12В)
ток потребления на хх: 0.080 А
частота вращения на хх: 4545 Об/мин
Длина двигателя(корпус) = 37.4 мм
Диаметр двигателя= 27.6 мм
С кожухом = 29.7
Длина вала с насечками = 8 мм
Диаметр вала — 2.3 мм
Это я уже после покупки докумекал, что можно было промерять параметры «паспортные», и искать соответствующий по даташиту, а до покупки решил подбирать эмпирическим путем. Соорудил простенькое устройство, замеряющее ток потребления и частоту вращения, и с этим агрегатом отправился в магазин. Из представленного ассортимента по габаритам подошли 5 двигателей, но по параметрам близки были только 2 шт. Взял тот, который при работе издавал более «приятный» звук.
Штатный ИВД работает тихо, мягко так сказать, а претенденты на покупку издавали звук, напоминающий звук паршивеньких движков из детских игрушек — визг, скрежет, завывания, хотя и не так сильно.
Параметры оказались не один в один, были опасения, что МК робота отвергнет его, но забегая вперед, он его принял как родного.
Вот параметры купленного двигателя:
Параметры «R-380 09320» на 24В:
напряжение питания: 12 В
ток потребления на хх: 0.064 А
частота вращения на хх: 3950 Об/мин

В онлайн, в других магазинах стоит он в 2 раза дешевле, но раз взялся за дело, ждать, когда они придут по почте, не охота, тем более свербит, а впереди есть время — выходные. Хотя, со стоимостью пересылки по нашей то почте, может вышло бы и дороже.
На вал штатного двигателя насажен «червяк». Вал с насечками. Сделал экстрактор для его снятия. Из-за насечек, диаметр червяка чуть больше диаметра вала нового двигателя, и чтобы червяк хорошо держался на валу, надо что-то придумывать. Просверлил, нарезал резьбу и закрутил винтики. Сверлить надо у самого основания витков, иначе винтики будут мешать.
 Синяя изолента кончилась.
Синяя изолента кончилась.
Скорость вращения колеса с новым двигателем на 25% ниже, т.е. одно колесо вращается немного быстрее второго. Опасения, что будет возникать ошибка в позиционировании на окне во время работы, оказались напрасны. Откуда стартанул, туда же и вернулся после цикла мойки окна. Возможно, на больших площадях и будет сказываться разность скоростей вращения.
Далее сборка, проверка, тестовый запуск.
Робот работает, стоимость ремонта 300 руб. без учета затраченного времени.
- Часы "Звезда". Восстановление работоспособности или "Путешествие в обратно".
- Свет в комнате с любого пульта 2. Работа над ошибками
- Обучаемый IR-контроллер для управления двумя группами светильников
- Бурбон по ускоренному способу, в мультиварке-скороварке Redmond RMC-PM400 за 4 дня
- Как изготовить ложементы для инструмента, купив 3Д принтер. Из коробки.
- Прототип системы удаленного мониторинга температуры в погребе на LoRa
- FM-радиоточка на основе attiny13 и rda5807m
- Ремонт li-ion аккумулятора опрыскивателя
- Джамп стартер на LiFePO4 – храним в машине, используем при минус 30 – плюс 55 ºC
- Светодиод SunLike SAWS0661A. Собираем LED лампу солнечного спектра с CRI97.


Вам также может понравиться

Миниатюрный аккумуляторный гравер

Энциклопедия занимательной кинематики. Колхоз-стайл.Гибридный лифт/подъёмник в мастерскую /яму. Хронология одной поделки….
